Experimentos con Uncanny Valley y el sentido del tacto en realidad virtual
Los ensayos de un grupo de investigadores de Microsoft estudian los efectos de los estímulos táctiles, y cómo las sensaciones hápticas de alta precisión no siempre producen una experiencia más realista e inmersiva.

El concepto de Uncanny Valley es conocido en el campo de la robótica, y se refiere a cuando el aumento de realismo en la apariencia humana de un robot puede llevar a una sensación de malestar o, incluso, de repulsión. Mientras que Uncanny Valley está relacionado directamente con el sentido de la vista, ¿puede producirse un fenómeno similar cuando se centra en el sentido del tacto, cuya ciencia se conoce como háptica?
En un artículo recientemente publicado en Science Robotics, un grupo de investigadores de Microsoft Research presentó una nueva teoría de la interacción háptica, que identifica un Uncanny Valley para el tacto. Sus ensayos sugieren que cuando los estímulos hápticos no están sincronizados con el resto de la percepción sensorial, pueden dificultar la experiencia. Los expertos creen que esta investigación creará una nueva tendencia de pensamiento entre los diseñadores de interacciones y dispositivos táctiles.
Los investigadores Mar González Franco, Eyal Ofek, Ken Hinckley, junto con Christopher Berger, investigador visitante del California Institute of Technology, eligieron la realidad virtual como banco de pruebas: una herramienta para revelar fenómenos extraños en la percepción sensorial cotidiana.
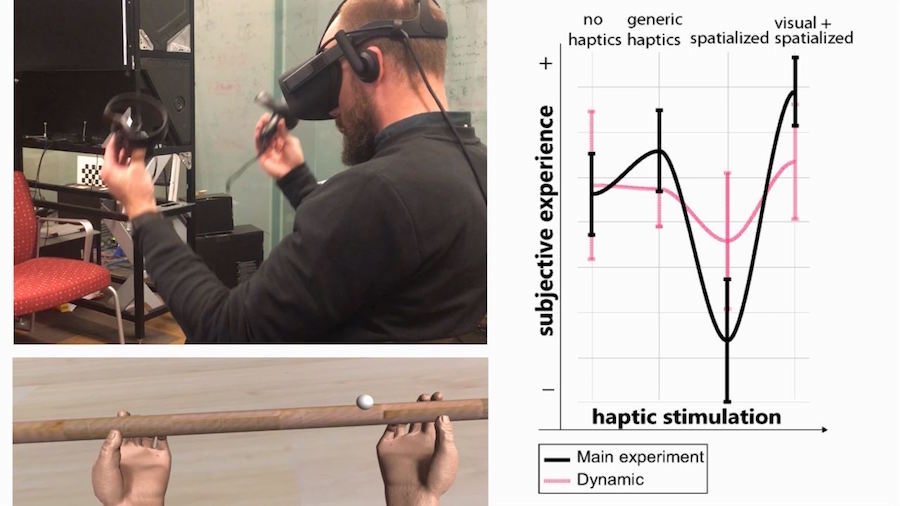
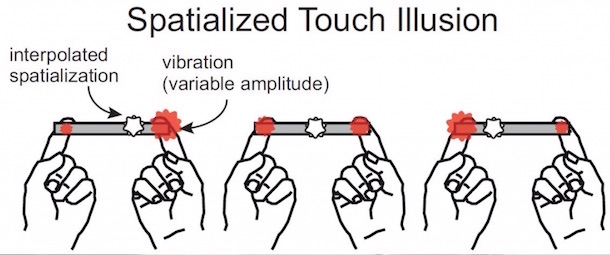
Es posible utilizar la RV para producir una sensación de tacto que aparenta originarse en un espacio completamente vacío entre las manos mientras se sostienen dos mandos. Cada mando proporciona al usuario estímulos vibro-táctiles sincronizados de diferentes amplitudes.
En el entorno virtual, se muestra al participante un listón de madera que agarra con cada mano. El listón es sólo imaginario: las manos no están físicamente unidas y el listón no existe. Luego se le muestra una pequeña canica blanca que parece golpear el listón en diferentes lugares, a medida que se varían las sensaciones vibratorias.
Lo que es interesante es que no sólo el listón es imaginario, sino también que la aparente ubicación espacial de la sensación táctil de la canica persiste, incluso si esta deja de ser visible. Esto se debe a que el cerebro sigue la regla de unidad, por la cual dos eventos sincronizados, que están conectados en el tiempo, también deben estar conectados en el espacio, por lo tanto tienen la misma causa y origen.
En este caso, las dos vibraciones que se sienten en las manos se perciben como el resultado de un solo toque que procede de la misma ubicación a lo largo del listón virtual, sin importar si la canica es visible o no.
En entornos virtuales, la generación de sensaciones hápticas de alta precisión de este tipo lleva asociadas la suposición de que tales mejoras siempre producirán una experiencia más realista e inmersiva.
Sin embargo, esta investigación descubrió que añadir el toque espacial por sí solo, sin la equivalencia visual de la canica, puede reducir en gran medida el realismo percibido y la inmersión en el entorno virtual. Los participantes en el experimento fueron capaces de precisar la ubicación de la sensación táctil de forma correcta, tanto cuando la canica era visible como cuando dejaba de serlo.
Otro vídeo del ensayo muestra el nuevo Uncanny Valley, donde una mayor calidad en la representación háptica genera una merma en la experiencia subjetiva. Sin embargo, este efecto puede ser modificado o eliminado manipulando sutilmente las condiciones experimentales.
Los investigadores encontraron que al reequilibrar el reflejo de la experiencia sensorial, concretamente al aumentar la calidad visual para proporcionar una fuente plausible para la experiencia háptica, se vuelve a lograr una sensación más completa de inmersión y una mejora de la experiencia subjetiva general.
Asimismo, la sensación puede manipularse en función de si se está simplemente sosteniendo el listón de madera virtual -experimentando así el golpe de la canica como participantes pasivos-, o moviendo activamente el listón hacia arriba y hacia abajo, convirtiéndonos así en el agente de la sensación a través de las propias acciones, lo que aumenta de nuevo el sentido de realismo e inmersión.
Comprender estos efectos más a fondo ayuda a construir entornos virtuales mejores y más convincentes. El resultado es clave para comprender de forma más exhaustiva cómo funciona realmente la percepción humana y ofrece un estímulo a los futuros esfuerzos que conseguirán aumentar el realismo sensorial de los anhelos virtuales.
Los investigadores creen que la demostración de este fenómeno, recientemente descubierto en la percepción háptica, así como los conceptos adicionales sobre cómo superar la repulsión al tacto háptico, son críticos no sólo en los mandos de realidad virtual y la teleoperación robótica, sino también en todo tipo de dispositivos táctiles.
Te gustó este artículo?
Suscríbete a nuestro RSS feed y no te perderás nada.
Otros artículos relacionados
 28 marzo 2016 Microsoft Research da un paso más en realidad aumentada con el proyecto Holoportation
28 marzo 2016 Microsoft Research da un paso más en realidad aumentada con el proyecto Holoportation- 21 enero 2016 Microsoft experimenta con la realidad aumentada para conseguir videoconferencias más inmersivas
- 5 julio 2013 Microsoft trabaja en el desarrollo de una pantalla multitáctil 3D que permite sentir el volumen de los objetos
- 29 abril 2013 Microsoft retoma su proyecto Viewport de telepresencia 3D con tecnología Skype
- 1 junio 2012 Microsoft desarrolla LightGuide, un asistente para mejorar la destreza de nuestras manos
- 26 diciembre 2013 Acer confía su transformación corporativa en Jason Chen, nuevo presidente ejecutivo y CEO
- 9 junio 2021 AtlasIED aporta en Atmosphere 2.0 más flexibilidad en diseño de sistemas de audio digital
- 5 enero 2017 Cabezas móviles wash e híbridas para iluminar el programa ‘Verstehen Sie Spass’
- 23 agosto 2012 El Museo San Telmo de San Sebastián acoge la exposición ‘Pantalla Global’
- 11 julio 2011 Paneles táctiles panorámicos y de pantalla ancha Modero X Series de AMX
- 17 septiembre 2013 IAB Spain da a conocer gráficamente la situación del mercado de digital signage
- 28 septiembre 2022 PPDS confirma su compromiso con Chromecast built in