シュナイダーとXBSは、モトGPを運転するスリルを再現するシミュレータを開発します
プロおよびセミプロのパイロットのトレーニング用に設計されています, このシミュレーターには、環境への没入感を高めるためのバーチャルリアリティテクノロジーが搭載されています, 体験をよりリアルにし、レーシングサーキットで実際の大排気量バイクを運転する興奮を伝えます.

とのコラボレーション シュナイダーエレクトリック, スタートアップXBSは、オープンイノベーションとコラボレーションを前提に、電動で持続可能なオートバイGPシミュレーターを開発しました. それは持っています 5 軸, 横滑りをエミュレートできます, 投資, メリーゴーラウンド, 加速と折りたたみ, 以上の気持ちで 200 時速キロメートル.
このシミュレータ, それはあなたがレースサーキットで大排気量のオートバイを運転するスリルを感じることを可能にします, シュナイダーエレクトリックトレーニングインスティテュートの共同コラボレーションのおかげで考案されました (ティッカー), XBSとラサールとカタルーニャ工科大学の学生の助け.
XBSは、2人のカタロニアの起業家によって形成された新興企業です, 彼らのガレージから、彼らはプロとセミプロのライダーのトレーニングのためのMotoGPシミュレーターの作成に取り組み始めました.
その結果、電気のみのMotoGPシミュレーターが生まれました, より速い応答で, 単相ネットワークに接続するより効率的な消費. 電動サーボドライブ技術とシュナイダーエレクトリック制御システムが使用されているソリューションです.
 それは3つの主要な要素から成ります. オートバイのフェアリングを備えた機械部品 1000 リアルCC, の機械システムに配置されています 5 車軸とチームが実際のバイクが作ることができるあらゆる動きをシミュレートできるようにします: 加速/ブレーキ, 逆さ馬/馬, リア/フロントスキッドと折りたたみ動作, に到着 60%.
それは3つの主要な要素から成ります. オートバイのフェアリングを備えた機械部品 1000 リアルCC, の機械システムに配置されています 5 車軸とチームが実際のバイクが作ることができるあらゆる動きをシミュレートできるようにします: 加速/ブレーキ, 逆さ馬/馬, リア/フロントスキッドと折りたたみ動作, に到着 60%.
これらの動きは、異なるサーボモーターと電気軸の機械的相互接続のおかげで達成されます。, シミュレータ用に設計されており、最大ユーザーをサポートします 100 キロ.
ハンドルバーステアリングとのユーザー操作, 加速とブレーキグリップ, オートバイの傾きと同様に、残りのボタンは電子カードを介してPCに送信されます. そして, コンピュータプログラムのおかげで, PCはシミュレータの各電気軸のモーション値を分解し、イーサネット/ OPCを介して送信されます, 非常に厳しいサイクルタイムで (<10さん) ユーザーに気付かれないようにするため, 各軸の制御を管理するPLCに.
この技術により、ユーザーはリアルな体験をし、レースサーキットで大排気量のオートバイを真に運転する興奮を感じることができます。.

シュナイダーエレクトリックソリューション
プロジェクトの課題の中で, 通常の3軸から5軸に移行していました, シミュレーションプロセスで本物のMotoGPを運転する実際の体験を生きることができました.
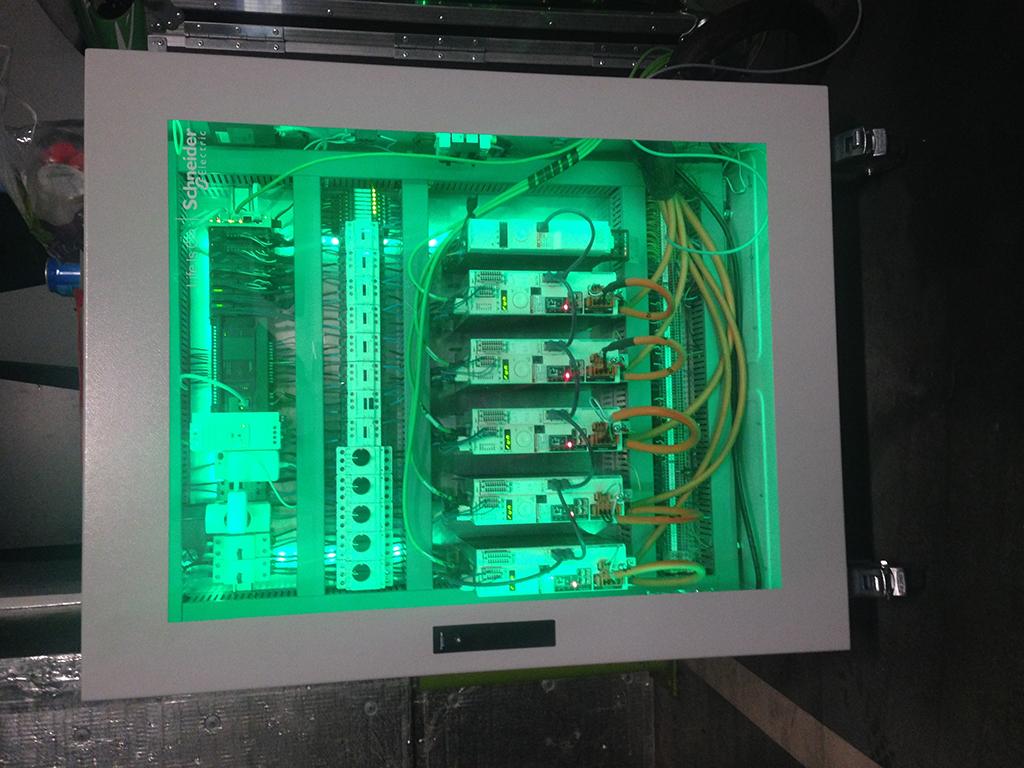
機械部品の実現のためにサーボモーターとサーボドライバーの取り付けを選択しました (単相電源付き) レクシウム範囲の 32 by シュナイダーエレクトリック. 5つのレキシウムで 32 シュナイダーエレクトリックのPAS4xまたはMAXR5軸直線運動を制御できます.
コントロールパネルには、各軸に必要なすべてのシュナイダーエレクトリックの電気的保護があります. 各軸の移動順序は、ロジックコントローラによって提供されます (ティッカー), シュナイダーエレクトリックのモディコンM241, キャンオープンバス経由. PLCは各軸の位置を収集し、イーサネットとOPC-DAを介してPCに送信し、コンピューターから移動命令を受信します.
さまざまなゲームモードの制御インターフェースは、コントロールパネルに設置されたHMIディスプレイとWebサーバーを介して実現できます。, WiFi経由でPLCに接続する. PLCから受信したデータとモーターサイクルのハンドルバーからのデータを使用して, PCはコンピュータアプリケーションを介して対話します. これにより、さまざまな動作モードや、特定の回路でパイロットを完成させるために実際のテレメトリをロードする可能性が可能になります。.
前の, se ha introducido la tecnología de realidad virtual para conseguir una mayor inmersión en el entorno y conseguir que la experiencia sea más realista y se transmita la emoción de conducir una verdadera moto de gran cilindrada en un circuito de carreras.
あなたはこの記事が好きでした?
私たちの購読 RSS フィード そして、あなたは何も見逃すことはありません.
その他の関連記事
 27 11 月 2019 クリスティスパイダーX80は、シュナイダーエレクトリックイノベーションサミット中にメイン画面を管理しました 2019
27 11 月 2019 クリスティスパイダーX80は、シュナイダーエレクトリックイノベーションサミット中にメイン画面を管理しました 2019- 17 4 月 2018 テックデータは、ホイールロードショーツアーでそのIoTを開始します 2018
- 4 12 月 2015 バルセロナは、スマートシティの都市サービスをインテリジェントに管理する方法を示しています
- 23 7 月 2014 シスコは、スマート シティに適用されるバルセロナのイノベーション センターで IoE を強化します。
- 25 6 月 2013 Schneider Electric participa con soluciones para hoteles de control de accesos en el V Congreso KNX
- 2 5 月 2013 シュナイダーエレクトリックは、家を見て、中メち家にKNXコントロールを提供しています 2.0
- 10 4 月 2013 シュナイダーエレクトリックのペルコは、エスプリSE PTZカメラシステムをIPに最適化します
- 4 2 月 2013 シュナイダーエレクトリックは、ペルコ3Dを紹介します, 3次元でビデオ監視システムの設計のための最初のソフトウェア
- 14 1 月 2013 Schneider Electric actualiza su sistema de transmisión a través de fibra óptica PelcoFiber
- 27 12 月 2012 シュナイダーエレクトリックは、ビデオセキュリティシステムの技術サービスを一元化
- 18 12 月 2012 ペルコの新しいSpectra HD 1080pソリューションが提供 9 標準カメラよりも解像度が高い倍
- 17 12 月 2012 シュナイダーエレクトリックが新しいペルコスペクトルHDドームポジショニングシステムを発表 1080